Aprilia, con la Shiver 750 del 2007, è stata la prima a introdurre il ride by wire sulle moto, e col tempo le cose sono sempre migliorate. È una questione di programmi di controllo più evoluti, di potenze di calcolo maggiori?
"Da allora i programmi sono evoluti ma la vera svolta è stata adottare la componentistica dedicata. Si è partiti con un sistema derivato dall'auto, ma poi abbiamo capito che le moto dovevano avere dei componenti studiati appositamente, dalla centralina, dai sensori, ai corpi farfallati".
Possiamo dire che è una tecnologia matura, o c'è ancora qualcosa da scoprire e mettere a punto?
"Oggi la gestione elettronica del motore non è più il vero valore aggiunto, ma fa parte di un certo tipo di moto e il cliente Aprilia se lo aspetta. C'è nelle 660, Tuareg compresa, e nel Gruppo Piaggio si sta espandendo. Lo abbiamo nella V85 Moto Guzzi, nell'MP3 530. Nei prossimi anni, anche per l'arrivo della Euro 5 plus, sarà esteso anche a motori piccoli".
Il controllo di trazione di oggi è cambiato, e funziona in modo non invasivo anche su moto che non hanno la piattaforma inerziale. Come funziona?
"È cambiano molto. Prima tagliava bruscamente, adesso interviene ma non si sente neppure. Anche senza andare a prendere come esempio la RSV4, che ha il sistema al top, lo stesso principio di funzionamento vale per esempio per l'MP3, dove ti accorgi che interviene solo perché si accende la spia. Non ha la piattaforma inerziale, ma sono state introdotte delle logiche che considerano l'accelerazione longitudinale e leggendo i micro slittamenti delle ruote riescono a prevedere la perdita di grip della ruota posteriore e applicano un intervento soft grazie al ride by wire che chiude la farfalla e ridurre dolcemente la coppia".
Passando all'estremo, alle gare, oggi com'è percepita l'elettronica dai piloti?
"All'inizio, sulla RSV4, la prima reazione di qualsiasi pilota è stata: 'Toglietemi tutti i controlli'. Perché il sistema, nato improntato sulla sicurezza, limitava le prestazioni. Oggi invece gran parte dei test in pista è dedicata alla messa a punto dell'elettronica, sfruttando tutte le possibilità, e i piloti sono ben contenti, perché vanno più forte. Una funzione molto utile è il controllo dell'impennata. Il lavoro dell'elettronica, che non si avverte, permette di mantenere la ruota anteriore alla quota che assicura la maggior accelerazione. Abbiamo delle acquisizioni di nostri tester che percorrono fino 200-300 metri con la ruota anteriore a due centimetri da terra rimanendo in pieno controllo. Recentemente abbiamo fatto dei test a Imola con un pacchetto evoluto di APRC, c'erano anche dei piloti di altissimo livello e anche loro, e pure il cronometro, hanno confermato che le prestazioni che si ottengono da questo tipo di controlli sono rilevanti. Qui siamo all'estremo, ma è per spiegare l'evoluzione di questi sistemi. I primi controlli di impennata, quelli che si basavano sulla differente velocità delle ruote, invece, tagliavano la coppia appena la ruota anteriore si sollevava, buttandola giù. Poi, appena riprendeva velocità, ridavano coppia, e si ricominciava. Così la ruota rimbalzava ed era un intervento fastidioso, che creava anche delle difficoltà nel mantenere la traiettoria, per questo i piloti chiedevano di spegnere i controlli".
Per quanto riguarda la RSV4 e derivate siamo arrivati a un livello molto alto su una moto di serie. C'è un margine di miglioramento?
"Abbiamo trovato una possibilità di miglioramento usando la piattaforma inerziale e altri parametri per esempio dall'ABS, e l'obiettivo è affinare ulteriormente i modelli predittivi, per fare in modo che riescano a far percepire ancora meno l'intervento dei controlli. Stiamo sempre lavorando per migliorare le funzioni sulle moto sportive perché abbiamo visto che quando le trasferiamo sulla gamma più stradale danno molto valore aggiunto. Per esempio sulla Tuareg ci sono funzioni che permettono, a chi non è un pilota esperto di offroad, e che quindi non è abituato a guidare in piedi, a far girare la moto col posteriore, che frena solo con l'anteriore, di essere molto più sicuro. Senza questi controlli rischierebbe di farsi male".
La RSV4 ha sempre l'APRC, ma ci sembra di capire che sia decisamente cambiato dalla prima versione. Quando si presenta un nuovo modello si parla di "funzioni con delle logiche più evolute" forse non se ne comprende la grande differenza. Anche perché possiamo immaginare che questi miglioramenti siano diluiti nel tempo.
"L'APRC è il nostro pacchetto di controlli elettronici, si chiama sempre così e le funzioni non hanno cambiato nome, per esempio il freno motore si chiama sempre AEM, il controllo di trazione ATC, per offrire continuità al cliente e facilitarne la gestione, ma da una versione all'altra sono sempre evoluti, compresi i sensori. C'è un team interno che lavora costantemente sulla dinamica del veicolo, e lavoriamo a stretto contatto con i fornitori dei sistemi di controllo motore per la miglior integrazione. C'è quindi una continua evoluzione di questi sistemi, e il passo più importante è stato passare ad algoritmi semi-predittivi".
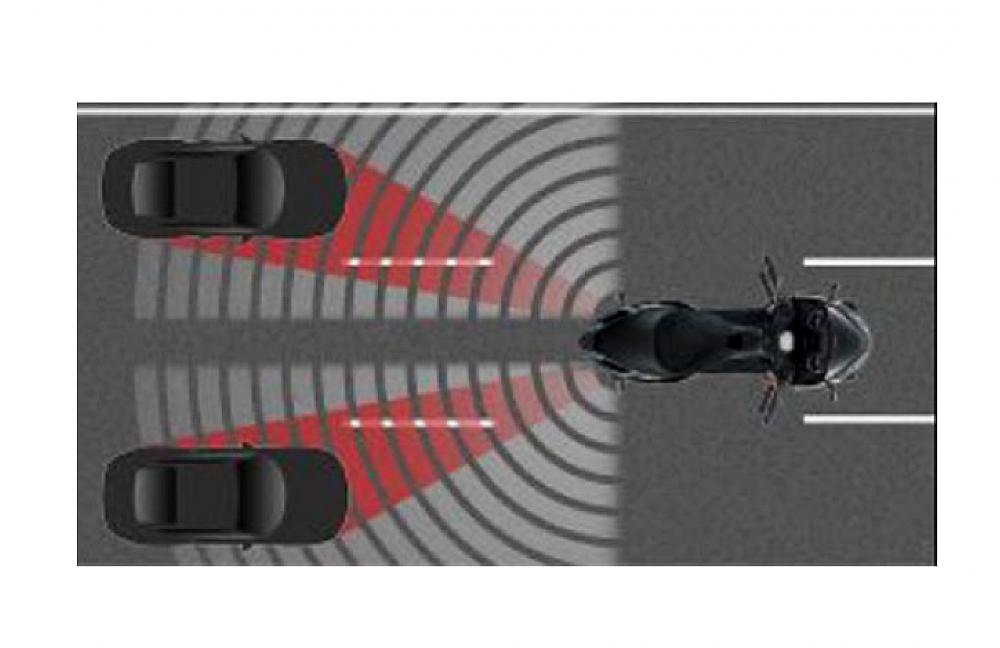
Passando alle ultime applicazioni, cos'ha di speciale l'Imaging Radar 4D? Perché serve su una moto?
"È un radar molto sofisticato che non solo riconosce la presenza di un oggetto, come il classico radar, ma ne valuta anche le dimensioni. È importante per riconoscere i falsi positivi, e questo riesce a farlo perché esegue una ricostruzione 3D dello spazio che monitora. Sulle auto un radar classico è affiancato a una telecamera, ma abbiamo valutato che per offrire questo contenuto su una moto la sua installazione fosse una complicazione non necessaria, anche per problemi di spazio, e per questo abbiamo utilizzato questo radar evoluto".
Tra le funzioni che può svolgere il sistema che usa l'Imaging Radar 4D c'è l'avviso di pericolo di collisione anteriore e posteriore. Perché non è stato applicato?
"Dobbiamo sempre pensare che applicare sistemi di questo tipo su una moto, uno scooter, è molto complesso rispetto a un'auto, perché c'è una dimensione in più, il rollio. In più anche il tipo di guida è molto diverso, per esempio con la moto ci sono i cambi repentini di corsia, il passaggio tra le corsie in fila… Tutto ciò complica molto le cose, poiché si corre il rischio di procurare dei falsi allarmi che attiverebbero in continuazione il segnale di pericolo sul cruscotto, disturbando la concentrazione che serve nella guida e facendo anche perdere 'credibilità' al sistema. Quindi prima di offrire una funzione che segnala un pericolo dobbiamo essere sicuri che sia affidabile".
Perché sull'MP3 non c'è il cruise control adattivo?
"È un tema che stiamo studiando da tempo e abbiamo concluso la fattibilità. Non l'abbiamo implementato perché sulle moto ha il grosso limite che non può essere un vero e proprio cruise control adattivo in tutte le condizioni di utilizzo, soprattutto quelle di emergenza. In caso di pericolo di tamponamento in auto posso attivare una frenata di emergenza, fino alla fermata, sulle moto no. Al massimo si è stimato si possa arrivare a 0,2-0,3 g di decelerazione, che non è certo una frenata di emergenza. Per capire: è come se viaggiando in quinta a metà regime, scalassi una marcia e frenassi col posteriore. È un valore certificato da prove sperimentali, se si supera quel limite il pilota, se non è pronto, viene sbalzato via dalla moto".
Le possibilità che offre l'elettronica si può dire siano infinite, considerando non solo la connettività personale ma quella con il mondo. Che funzioni possiamo immaginare per il futuro?
"Pensiamo a cosa potrà succedere da oggi a 4 anni. Per prima cosa si devono creare dei sistemi adatti alle moto, non derivare quelli in uso dalle auto, come abbiamo visto per il ride by wire e il radar. Dobbiamo capire cosa ci serve e integrarlo, semplificandolo il più possibile, puntando sull'integrazione e sulla miniaturizzazione. Oggi tutte le case stanno lavorando sulla mobilità elettrica ma a prescindere dal tipo di motore ci dobbiamo concentrare sui contenuti per migliorare l'esperienza della guida. Sarà importante sviluppare i sistemi di monitoraggio in remoto delle condizioni del veicolo, in particolare se elettrico, poi sarà possibile implementare il parental control, nelle forme più o meno estese. E siccome le funzioni si stanno moltiplicando occorrerà usare dei sistemi per comunicare gli avvisi e mostrare i dati al pilota in modo da offrire un'esperienza di guida naturale, che non lo costringa a guardare costantemente il display, e lo possiamo fare utilizzando tutti i sensi, la vista, l'udito, il tatto, per esempio con avvisi audio, proiettando informazioni sulla visiera del casco, mandando segnali vibranti sulle manopole. Ora sull'MP3 e su alcune moto del gruppo siamo arrivati a 5 pulsanti per selezionare le funzioni, e secondo me siamo già al massimo. A livello di controlli di sicurezza a mio parere siamo arrivato al top, non c'è tanto altro, ma in tema di controllo attivo, sulle moto sono proprio di nicchia, come detto per il cruise control. E non vedo la possibilità un utilizzo esteso della guida autonoma, come sulle auto, perché per la guida la moto richiede l'utilizzo anche del corpo. Esistono esercizi di veicoli self-standing (vedi Honda, ndr), ma ritengo che qualora dovessero trovare una produzione di serie, sarebbero confinati a profili di missione dedicati. Uno sviluppo concreto che vedo nei prossimi anni è quello relativo alla comunicazione fra il veicolo e l'ambiente nel quale si muove. In questo campo ci sono enormi spazi di manovra e la reale possibilità di offrire qualcosa che dia valore aggiunto al cliente".